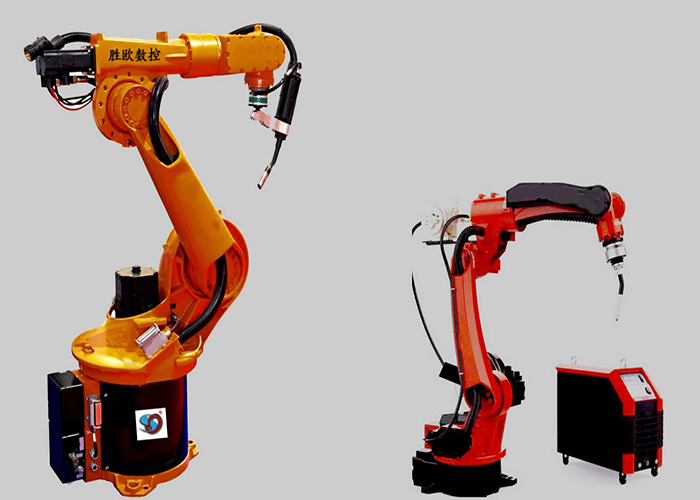
山东智能工业机器人厂家 胜欧数控
- ¥0.000
- 更新 2020-05-29
- 地区 山东淄博市桓台县山东省淄博市桓台县果里镇东边村
- 联系 姜华 13276436092
- 淄博胜欧数控科技有限公司进入店铺 >>
信息介绍 / Information introduction
四轴机械手和六轴关节式机械手的区别。其中,四轴机械手是特别为高速取放作业而设计的,而六轴机械手则提供了更高的生产运动灵活性,山东智能工业机器人厂家。四轴机械手:小型装配机械手中,“四轴机械手”是指“选择性装配关节机器臂”,即四轴机械手的手臂部分可以在一个几何平面内自由移动。机械手的前两个关节可以在水平面上左右自由旋转,山东智能工业机器人厂家。第三个关节由一个称为羽毛(quill)的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机械手具有很强的刚性,从而使它们能够胜任高速和高重复性的工作,山东智能工业机器人厂家。在包装应用中,四轴机械手擅长高速取放和其他材料处理任务。
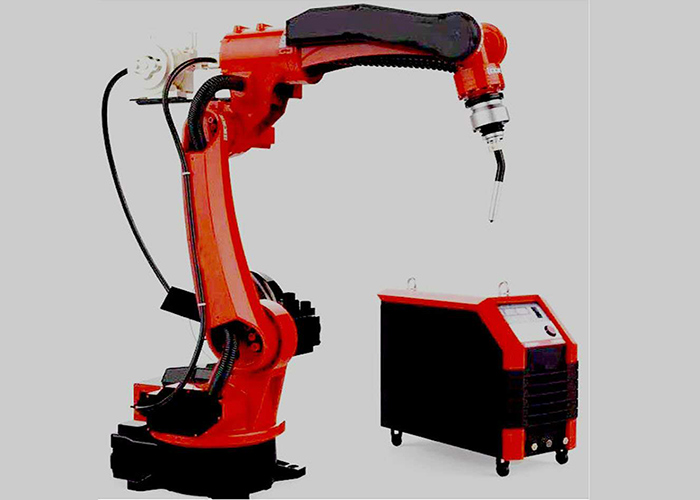
1、稳定和较高的焊接质量: 采用六轴机器人焊接时,由于每条焊缝的焊接参数都是恒定的,焊缝质量不受人为因素得影响,所以焊接质量是稳定的。而人工焊接时,焊接速度、焊枪距离,工人状态等因素都是变化的,因此很难做到质量的均一性。 2、提高劳动生产率: 机器人没有疲劳状态,可24h连续生产。而且采用双工位交替焊接时,机器焊接时间和工件安装时间重叠,效率提高的更加明显。 3、产品周期明确: 容易控制产品产量。机器人的生产节拍是固定的,因此安排生产计划非常明确。 通过上面的介绍,大家对六轴机器人焊接的优势是什么已经知道了吧,采用机器人进行生产,可以提高生产设备的自动化生产水平,还改善了工人的劳动条件,让工人远离了焊接弧光、烟雾飞溅等有害的环境,感谢大家的阅读 工业机器人通常指的是一个单纯的机器人(它是机器人的一种,其他的如服务机器人等)。自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则**行动。可进行编程操作,但它自己通常和末端执行器(机械手)组装才能组成一**整的机器。
操作机的设计方法和步骤:(1)确定工作对象和工作任务开始设计操作机之前,首先要确定工作对象、工作任务。1)焊接任务:如果工作对象是一辆汽车或是一个复杂曲面的物体,工作任务是对其进行弧焊或点焊,则要求机器人的制造精度很高,弧焊任务对机器人的轨迹精度和位姿精度及速度稳定性有很高的要求,点焊任务对机器人的位姿精度有很高的要求,两种任务都要求机器人具备摆弧的功能,同时要能在狭小的空间内自由地运动,具备防碰撞功能,故机器人的自由度至少为六个。
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。