山东定制工业机器人 胜欧数控
- ¥0.000
- 更新 2020-05-04
- 地区 山东淄博市桓台县山东省淄博市桓台县果里镇东边村
- 联系 姜华 13276436092
- 淄博胜欧数控科技有限公司进入店铺 >>
信息介绍 / Information introduction
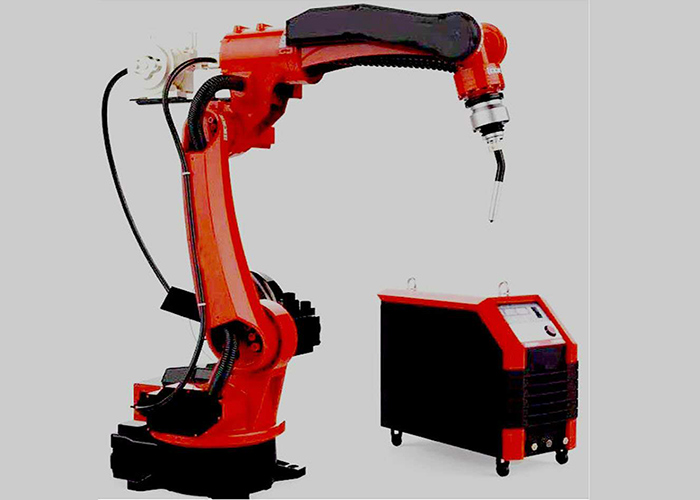
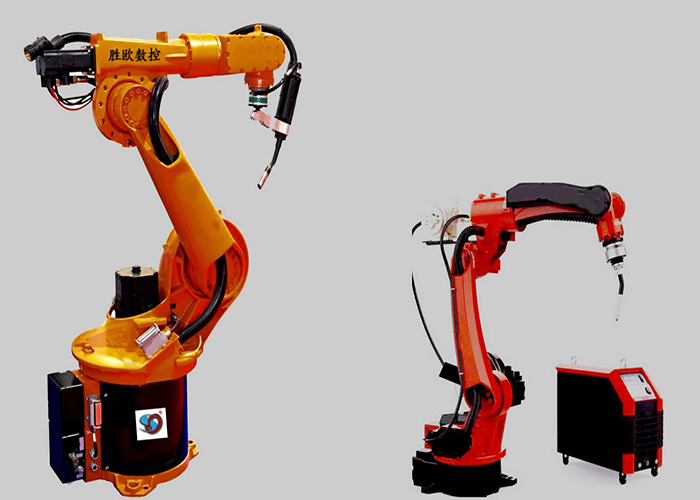
近几年来我公司直致力于焊接机器人在实际生产中的应用和开发,结合我公司多年从事焊接装备及控制的优势. 给用户提供品佳工装相当合理的配重和先进的工艺解决方室,我们的焊接工作站可泛应用于建筑,食品机械,换热器 近年大国生产.箱体焊接,山东定制工业机器人.过路器,工程机械等多个领域:有单工位的.也有2工位及多工位的,山东定制工业机器人.还有应用于生产线流水作业中:在焊接不锈钢,铝和碳钢方面积累了丰富的经验,并竭诚为各个行业的用户提供比较好的解决方案。 机器人工作站的组成 机器人本体控制系统焊接工装焊接电源焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备.以弧焊及点焊为例.则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳) ,山东定制工业机器人,工装等部分组成。对于智能机器人还应有传感系统.如激光或摄像传感器及其控制装置等。
工业机器人重点部件-谐波减速器的传动原理是什么?它主要由三个基本构件组成:(1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮;(2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮;(3)波发生器H,它相当于行星架。作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
操作机的设计方法和步骤:3)搬运任务:如果工作对象比较笨重,工作任务是定点搬运,定位精度要求高,则对机器人的承载能力和定位精度有高的要求。如果工作对象比较轻巧,工作任务也是定点搬运,但要求轻拿轻放,且定位精度要求高,则对机器人的速度稳定和定位精度有高的要求。4)装配任务:对机器人的速度稳定密和位姿精度有很高的要求。设计新型机器人时,要充分考虑以上诸多因素,并应多参考国内外同类产品的先进机型,参考其设计参数,经过反复研究和比较,确定出所要机械部分的特点,定出设计方案。

免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。