汽车零部件机器人焊钳公司 广州亨龙智能装备股份供应
- ¥0.000
- 更新 2024-01-25
- 地区 广东广州市从化市广州市从化区太平镇新一路63号
- 联系 郑素芬 13926119969
- 广州亨龙智能装备股份有限公司进入店铺 >>
信息介绍 / Information introduction
机器人焊钳的安全性保障主要包括以下几个方面:1.设计安全性:机器人焊钳的设计应符合相关的安全标准和规范,如ISO 10218、EN 60204等。设计时应考虑到人员安全和设备安全,如设置安全门、安全光幕、急停按钮等。2.安全控制系统:机器人焊钳应配备安全控制系统,包括安全传感器、安全控制器、安全继电器等。这些设备可以监测机器人的运动状态,及时发现异常情况并采取相应的安全措施。3.培训和教育:机器人焊钳的操作人员需要接受专业的培训和教育,了解机器人的工作原理、安全操作规程和应急措施等。同时,操作人员应具备一定的机械和电气知识,能够快速判断和处理机器人故障。4.定期维护和检查:机器人焊钳需要定期进行维护和检查,确保设备的正常运行和安全性。维护和检查包括清洁、润滑、更换易损件等,同时也要检查安全控制系统的运行状态,及时发现和处理故障。综上所述,机器人焊钳的安全性保障需要从设计、控制系统、培训和教育、维护和检查等多个方面入手,确保设备的安全运行和人员的安全。机器人焊钳是一种高效、精确的自动化焊接设备,能够大幅提高生产效率。汽车零部件机器人焊钳公司
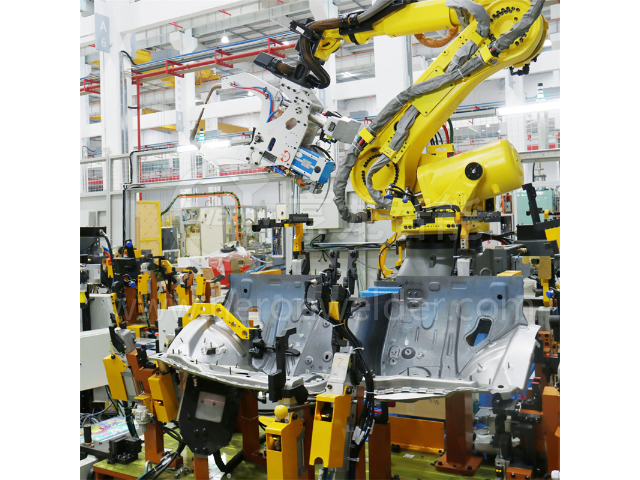
机器人焊钳实现自动化焊接需要经过以下步骤:1.设计焊接程序:根据焊接要求和工件形状,设计出适合的焊接程序,包括焊接路径、焊接速度、焊接电流等参数。2.安装机器人焊钳:将机器人焊钳安装在焊接设备上,调整好焊接角度和位置。3.编写控制程序:编写控制程序,将焊接程序转化为机器人焊钳能够识别和执行的指令。4.进行焊接:将工件放置在焊接设备上,启动机器人焊钳进行自动化焊接。5.检测焊接质量:通过焊接质量检测设备对焊接质量进行检测,确保焊接质量符合要求。机器人焊钳实现自动化焊接具有高效、精确、稳定等优点,可以很大程度的提高焊接效率和质量,减少人工操作的繁琐和危险。汽车零部件机器人焊钳公司机器人焊钳是一种高效、精确的焊接工具,能够在短时间内完成复杂的焊接任务。
机器人焊钳常见的故障有以下几种:1.焊钳夹紧不牢:可能是夹紧力度不够,需要调整夹紧力度;也可能是夹紧机构损坏,需要更换夹紧机构。2.焊钳夹紧不平衡:可能是夹紧机构不平衡,需要调整夹紧机构;也可能是夹紧机构损坏,需要更换夹紧机构。3.焊钳夹紧后松动:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度不够,需要调整夹紧力度。4.焊钳夹紧后无法松开:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度过大,需要调整夹紧力度。5.焊钳夹紧机构卡死:可能是机构内部零件损坏,需要更换零件;也可能是机构内部积尘过多,需要清洗维护。解决这些故障的方法包括:调整夹紧力度、更换夹紧机构、更换零件、清洗维护等。同时,对机器人焊钳进行定期维护和保养,可以有效预防故障的发生。
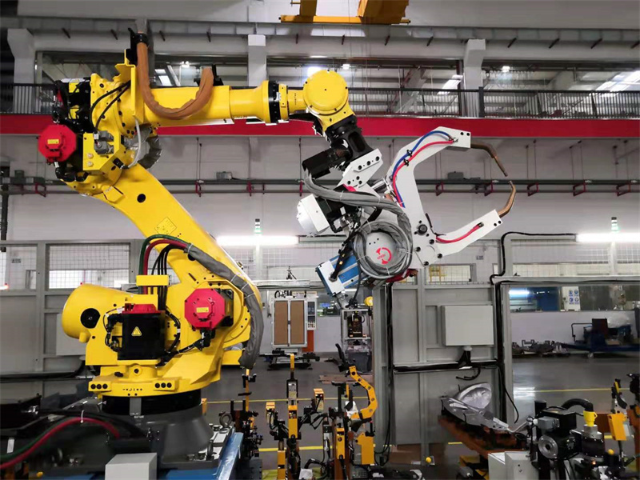
焊接机器人是通过人工智能技术、传感技术、通信技术等制造出来的用于自动化焊接作业的机械设备,具有效率高、成本低、生产周期明确、自动化水平高、产品质量稳定等特点,广泛应用于工程机械制造、汽车及汽车零部件制造、煤矿行业、市政施工、石油天然气管道、船舶制造等领域,以提高产品竞争力,保障用户的生产效益。焊接机器人在焊接过程中不需要人为参与,对工件进行自动焊接的机械设备,可以用来代替传统焊接,在焊接过程中可以实现稳定焊接,提高焊接生产线的速度,焊接机器人和传统焊接较大的区别就是它的智能控制控制系统。机器人焊钳采用先进的传感技术和控制系统,能够实现高精度的焊接操作。

机器人焊钳的焊接质量可以通过以下几个方面来保证:1.焊接参数的控制:机器人焊钳的焊接参数包括焊接电流、电压、焊接速度、焊接时间等,这些参数的控制对焊接质量有着至关重要的影响。因此,在使用机器人焊钳进行焊接时,需要对这些参数进行精细的调整和控制,以确保焊接质量的稳定和一致性。2.焊接材料的选择:机器人焊钳的焊接材料对焊接质量也有着重要的影响。在选择焊接材料时,需要根据焊接对象的材料和要求,选择合适的焊接材料,以确保焊接质量的稳定和可靠性。3.焊接工艺的优化:机器人焊钳的焊接工艺也是影响焊接质量的重要因素。在进行焊接前,需要对焊接工艺进行优化,包括焊接顺序、焊接路径、焊接角度等,以确保焊接质量的稳定和一致性。4.检测和修正:在机器人焊钳进行焊接时,需要对焊接质量进行实时检测和修正。通过使用传感器和监控系统,可以对焊接质量进行实时监测和反馈,及时发现和修正焊接质量问题,以确保焊接质量的稳定和可靠性。综上所述,机器人焊钳的焊接质量可以通过焊接参数的控制、焊接材料的选择、焊接工艺的优化以及检测和修正等方面来保证。机器人焊钳的操作过程中能够实现实时监控和数据记录,方便后续的数据分析和优化。汽车零部件机器人焊钳公司
机器人焊钳的使用可以大幅降低人力成本,提高生产效率,降低生产成本。汽车零部件机器人焊钳公司
机器人焊钳的操作难度可以从以下几个方面进行评估:1.技术难度:机器人焊钳需要掌握多种技术,如机器人编程、焊接技术、传感器技术等,这些技术的掌握难度较高,需要专业的技术人员进行操作。2.系统难度:机器人焊钳需要整合多个系统,如机器人系统、焊接系统、控制系统等,这些系统的整合难度较高,需要专业的系统集成人员进行操作。3.环境难度:机器人焊钳需要在特定的环境下进行操作,如高温、高压、有害气体等环境,这些环境的操作难度较高,需要专业的操作人员进行操作。4.安全难度:机器人焊钳需要遵守严格的安全规定,如防止机器人碰撞、防止电击等,这些安全规定的遵守难度较高,需要专业的安全人员进行操作。综上所述,机器人焊钳的操作难度较高,需要专业的技术人员、系统集成人员、操作人员和安全人员进行操作,同时需要严格遵守相关的技术、系统、环境和安全规定。汽车零部件机器人焊钳公司
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。